 I've graduated from Master of Artificial Intelligence (MAI) (advanced degree) program at Monash University, Melbourne, Australia.
Previously, I've been contributed to be a part of the CMOS Image Sensor SW team at Samsung Research (Bangalore, INDIA) working on building cutting-edge mobile image sensors (such as industry-first 200 MP).
I've graduated from Indian Institute of Technology (IIT) Kanpur, INDIA with a Bachelor of Technology (BTech - Double Major program) in Mechanical Engineering & Electrical Engineering (ME-EE).
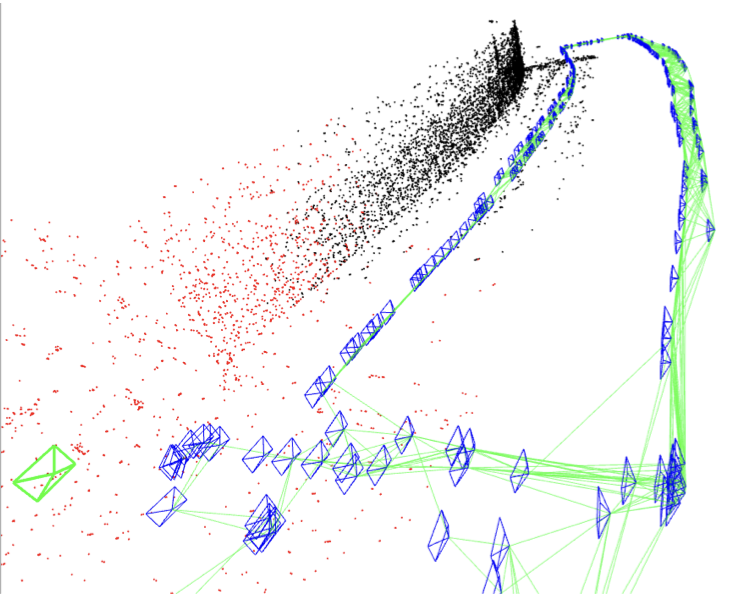
During my senior year in the undergrad, I've also collaborated with Prof Pratap Tokekar (Department of Computer Science, University of Maryland, USA), who supervised me on the research topic of aerial robotic vision.
I've graduated from Master of Artificial Intelligence (MAI) (advanced degree) program at Monash University, Melbourne, Australia.
Previously, I've been contributed to be a part of the CMOS Image Sensor SW team at Samsung Research (Bangalore, INDIA) working on building cutting-edge mobile image sensors (such as industry-first 200 MP).
I've graduated from Indian Institute of Technology (IIT) Kanpur, INDIA with a Bachelor of Technology (BTech - Double Major program) in Mechanical Engineering & Electrical Engineering (ME-EE).
During my senior year in the undergrad, I've also collaborated with Prof Pratap Tokekar (Department of Computer Science, University of Maryland, USA), who supervised me on the research topic of aerial robotic vision.
Senior Software EngineerSystem LSI, SAMSUNG RESEARCH (India) |
(July'19 - November'22) |
|
> Devised a simpler & efficient Flicker Mitigation Algorithm for preview mode of super slow motion videos (480, 960 fps). > Developed & owned Bad Pixel Compensation, Remosiac & Upscaler related modules of firmware for various mobile image sensors (such as flagship Galaxy S series). |
|
Data Science InternGramophone (India) |
(May'18 - August'18) |
|
> Deep Learning based auto-detection of crop diseases in RGB images. > Created Ask Anna: chat assistant (an information retrieval system). > Build Recommendation system for the personalized community posts. |
|
Research ScholarRobotics Algorithms and Autonomous Systems (RAAS) Lab, Virginia Tech, USA |
(June'17 - March'18) |
|
> Visual Odometry for UAVs to autonomously inspect bridges: - Comprehensively analyzed the integration of visual data with Inertial Measurement Units (IMUs) using various VIO/SLAM methods & was presented in the proceedings of the International Symposium of Experimental Robotics, ISER-2018. - Formulated a novel method to integrate 2D LiDAR data with the odometry pipeline as a feedback loop. |
 |
Research InternSwaayatt Robots (India) |
(June'17 - August'18) |
|
> Simultaneous Localization and Mapping for robots in warehouses: - Build highly robust, accurate SLAM algorithm (based on ORB SLAM2) for indoor environments & ultimately package it for self driving cars. - Proposed a system with the front end based on deep learning architecture for image (or feature) matching and the backend involves optimization & robust filtering of wrong loop closure detection. |
|
AI-powered web-applications to promote health & well-being in AustraliaTeam of 4, Industry Experience studio, Monash University {Please contact to request for demo to web-app} [Product doc] [DS/AI ppt] |
(August'24 - November'24)
|
AI strategies for climate action initiativesVirtual Internship, Oracle Australia |
(June'24 - July'24) |
Multi-Agent Reinforcement Learning (MARL) {with Game Theory}Term Project, Monash University |
(August'23 - November'23) |
Visual Question Answering (VQA)Supervisor: Prof Harish Karnick, Dept. of CSE, IIT Kanpur [pdf] |
(March'18 - April'18) |
| (February'18 - April'18) | |
| (August'17 - April'18) |